К 50-летию
ЦУПа г. Королёв: исторические вехи, ЧАСТЬ 2,
ЧАСТЬ 1
Международная космическая станция
Международная космическая станция – крупнейший научно-технический проект современности.
В создании МКС участвуют 14 стран: США, Россия, Япония, Канада, Италия, Бельгия, Нидерланды, Дания, Норвегия, Франция, Испания, Германия, Швеция и Швейцария. Первоначально среди участников были ещё Великобритания и Бразилия, но затем они вышли из проекта.
Роль России в этом проекте – одна из ведущих. Опыт, накопленный российской космонавтикой за период эксплуатации собственных пилотируемых орбитальных станций, во многом стал практической базой для создания МКС.
Основные направления использования МКС включают в себя фундаментальные медико-биологические исследования, производство высокотехнологических материалов и биопрепаратов, изучение поведения организма человека в условиях длительного космического полёта, фундаментальные исследования микрогравитации, астрофизические исследования, изучение атмосферы и поверхности Земли в интересах фундаментальных наук и для прикладных целей, строительство в космосе крупных сооружений для различных исследований и межпланетных перелётов.
Практическая реализация этапа создания новой станции непосредственно на околоземной орбите началась 20 ноября 1998 года запуском её первого модуля – функционально-грузового блока (ФГБ) «Заря». В декабре того же года корабль «Индевор» вывел на орбиту соединительный модуль «Юнити» (Unity – «Единство») и состыковал его с ФГБ «Заря». В июле 2000 года состав МКС пополнился третьим модулем. Им стал служебный модуль «Звезда».
По своему назначению модуль «Звезда» является основой российского сегмента МКС. Он обеспечивает деятельность экипажа и управление станцией с регулярно меняющейся конфигурацией. На этапе развёртывания МКС СМ «Звезда» служил базовым блоком всей станции, основным местом для жизни и работы экипажа.
В 2001 году в состав МКС были введены американские лабораторный модуль «Дестини» (Destiny – «Судьба») и шлюзовая камера «Квест» (Quest – «Поиск») и российский стыковочный отсек «Пирс», выполняющий также роль шлюзовой камеры при выходах в открытый космос. В последующие годы был развёрнут энергетический узел мощных солнечных батарей. Для обеспечения работ в открытом космосе установлена мобильная транспортная система с канадским дистанционным манипулятором Canadаrm-2.
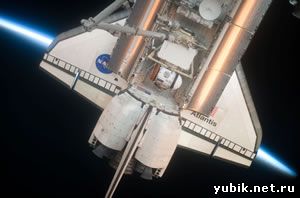
Снабжение МКС осуществляется с помощью российских пилотируемых кораблей «Союз ТМ», «Союз ТМА», автоматических грузовых кораблей «Прогресс М», «Прогресс М1» и американских кораблей системы «Спейс шаттл» («Индевор», «Дискавери», «Атлантис»). Российские космические грузовики регулярно доставляют на МКС топливо, необходимое для осуществления манёвров с помощью реактивных двигателей, которые в настоящее время имеются только на российском сегменте.

2 ноября 2000 года на корабле «Союз ТМ-31» на станцию прибыл экипаж первой основной экспедиции (МКС-1) – Уилльям Шеперд (командир), Юрий Гидзенко (пилот) и Сергей Крикалёв (бортинженер). С этой даты МКС стала постоянно обитаемой станцией. На её борту, сменяя друг друга, по несколько месяцев стали работать экипажи основных экспедиций, в состав которых входили российские космонавты и американские астронавты. Смена этих экипажей производилась с помощью американских кораблей «Спейс шаттл». Российские корабли «Союз», имеющие большой ресурс пребывания в космосе, служили в качестве средства спасения экипажа в случае необходимости срочного покидания станции. Постоянно на МКС находился один из таких кораблей-спасателей. Их замена осуществлялась через полгода во время полётов российских экспедиций посещения.
До начала работы экипажа первой основной экспедиции МКС была только эпизодически посещаемой. Экипажи кораблей «Спейс шаттл», в состав которых, кроме американских астронавтов, включались космонавты России и других стран, доставляли на станцию оборудование для её дооснащения, проводили необходимые регламентно-профилактические работы.
Со времени начала строительства по состоянию на сентябрь 2010 года на МКС побывали уже 196 человек – граждане США, России, Канады, Италии, Франции, Японии, ЮАР, Бельгии, Испании, Нидерландов, Бразилии, Германии, Швеции, Малайзии и Республики Корея.
В связи с произошедшей 1 февраля 2003 года катастрофой американского корабля «Колумбия», в которой погибли все семь членов экипажа, были приостановлены полёты и других кораблей системы «Спейс шаттл»: «Индевор», «Атлантис», «Дискавери». Соответственно остановилось и строительство американского сегмента МКС. Реально поддержать работоспособность МКС до возобновления полётов американских кораблей можно было лишь с помощью российских средств. Учитывая ограничения по снабжению МКС, тогда приняли решение формировать экипажи основных экспедиции не из трёх, а из двух человек, и смену этих экипажей проводить с помощью российский кораблей «Союз». Таким образом, начиная с седьмой экспедиции, на станции постоянно работали уже только два человека. Третий член экипажа на борту МКС появился в июле 2006 года. Им стал астронавт Европейского космического агентства Томас Райтер. Его доставил на станцию шаттл «Дискаверм» STS-121. Это был второй полёт шаттла после катастрофы «Колумбии». Первый, испытательный, полёт состоялся в июле 2005 года.
Строительство МКС продолжилось. На станцию были доставлены новые секции солнечных батарей, значительно повысившие её энерговооружённость. В конце 2007 года МКС пополнилась ещё двумя герметичными модулями. В октябре шаттл «Дискавери» STS-120 привёз на орбиту изготовленный в Италии по заказу США ещё один соединительный модуль Node-2 (Node-1 под называнием «Юнити» работает в составе станции с декабря 1998 года). В ноябре Node-2, теперь он называется «Хармони» (Harmony – «Гармония»), с помощью манипулятора станции был поставлен на своё штатное место – на осевой порт модуля «Дестини». По своему назначе6ию Node-2 является соединительным узлом между тремя лабораторными модулями: американским «Дестини», европейским «Колумбус» (Columbus) и японским «Кибо». Кроме того, осевой стыковочный узел Node-2 теперь стал основным причалом для шаттлов.
Европейский лабораторный модуль «Колумбус», предназначенный для постоянной работы в составе МКС, в декабре 2007 года был выведен на орбиту на корабле «Атлантис» STS-122 и с помощью манипулятора этого корабля поставлен на свое штатное место. В 2008 году в состав МКС введён японский модуль «Кибо» (Kibo – по-японски «Надежда»). Для этого потребовалось три запуска американских шаттлов.
В 2009 году в состав российского сегмента МКС введён малый исследовательский модуль «Поиск».
В феврале 2010 года для американского сегмента МКС шаттлом «Индевор» STS-130 были доставлены жилой модуль «Транквилити» (Tranquility – «Спокойствие») и обзорный модуль «Купола» (Kupola – «Купол»). В мае того же года шаттл «Атлантис» STS-132 привёз российский исследовательский модуль «Рассвет».
В планах НАСА предполагается дооснастить свой сегмент ещё одним герметичным модулем и на этом завершить его строительство. Российский сегмент ещё будет наращиваться за счёт присоединения к нему новых научных модулей.
С декабря 2009 года на Международной космической станции при смене экипажей принята так называемая непрямая пересменка. Прямая – это когда на станцию прибывает новый экипаж, а старый, сдав ему вахту, отправляется домой, на Землю. Так продолжалось до той поры, пока постоянный состав экипажа МКС не превышал трёх человек. А когда он удвоился, стало понятным, что старую схему надо менять.
Последняя прямая пересменка была в октябре 2009 года. В то время станцией командовал российский космонавт Геннадий Падалка, и он передавал свои полномочия европейскому астронавту бельгийцу Франку Де Винну. У причалов МКС стояли три «Союза», три российских корабля. А на борту станции одновременно находились девять человек.
Можно, конечно, заметить, что во время прилёта шаттлов бывало и побольше. В прежние годы – по десять человек, а после увеличения численности экипажа МКС – и по двенадцать. Но шаттловцы прибывали со своими ресурсами по средствам жизнеобеспечения, со своей конкретной программой: пришли, что-то там установили, подключили и ушли. Ели и спали шаттловцы тоже только в своём корабле. А тут – все вместе, всё только за счёт станции. Подсчитали и пришли к выводу, что гораздо выгоднее использовать другую схему смены экипажей.
На станции теперь будут постоянно находиться не более шести человек, т.е. два экипажа кораблей «Союз». Кстати, российские «Союзы» с самого начала и до сих пор остаются единственным средством, способным в любой день полёта обеспечить возвращение космонавтов на Землю, если возникнет такая необходимость. Непрямая пересменка заключается в том, что экипаж одного из «Союзов», заканчивая свою вахту на борту МКС, передаёт дела экипажу другого «Союза», а сам возвращается на Землю. Через две-три недели прилетает следующий «Союз», и прибывшие на нём космонавты включаются в работу на станции.
Дальний космос
Параллельно с работами по пилотируемым программам ЦУП обеспечивал управление космическими аппаратами, совершавшими полёты к другим планетам. Сначала ими управляли из Центра дальней космической связи, который находился в Крыму под Евпаторией, а после успешного завершения программы ЭПАС управление ими полностью передали в подмосковный ЦУП.
В сентябре 1978 года были запущены автоматические межпланетные станции «Венера-11» и «Венера-12». Через три месяца обе станции достигли окрестностей планеты Венера. За двое суток до подлёта к этой планете от них отделили спускаемые аппараты, которые затем совершили мягкую посадку на её поверхность на расстоянии 800 километров один от другого. А сами станции после отделения спускаемых аппаратов были переведены по отношению к Венере на пролётные траектории. Для передачи научной информации была реализована баллистическая схема, обеспечившая необходимое взаимное пространственное положение станций и спускаемых аппаратов. Информация, получаемая каждым спускаемым аппаратом, передавалась на свою станцию, откуда затем транслировалась на Землю.
В конце 1981 года отправились в межпланетный полёт автоматические станции «Венера-13» и «Венера-14», по конструкции и составу научной аппаратуры аналогичные своим предшественницам. Схема их полёта тоже была аналогичной. А после посадки на поверхность планеты спускаемые аппараты этих станций передали на Землю ещё и цветные панорамы венерианских пейзажей. С помощью грунтозаборных устройств были взяты пробы грунта и проведён его химический анализ.
В июне 1983 года были выведены на межпланетную траекторию очередные автоматические станции «Венера-15» и «Венера-16», предназначавшиеся для радиолокационного картографирования этой планеты. По окончании межпланетного перелёта обе станции перевели на околовенерианские орбиты, и они приступили к выполнению своей основной задачи.
В начале 80-х годов прошлого века мировая научная общественность готовилась к встрече с кометой Галлея, которая появляется в Солнечной системе раз в 76 лет. СССР, США, Европа и Япония разрабатывали специальные космические аппараты для изучения кометы (в США потом отказались от этого проекта). Советские автоматические станции «Вега-1» и «Вега-2» ушли в полёт уже в декабре 1984 года, поскольку они предназначались для исследований сразу двух объектов – планеты Венера и кометы Галлея. Поэтому проект получил название «Венера–Галлей» или сокращённо – «Вега». В проекте вместе с советскими учёными приняли участие их коллеги из Австрии, Болгарии, ГДР, Польши, Чехословакии, Франции и ФРГ.
В июне 1985 года обе станции достигли окрестности Венеры. Здесь от них отделились спускаемые аппараты, которые провели исследование атмосферы планеты и её поверхности, А сами станции продолжили свой путь на встречу с кометой Галлея. Эта встреча состоялась в марте 1986 года.
Если для СССР это был очередной полёт в дальний космос, то для Европы – первый в их истории опыт разработки и создания межпланетного аппарата, названного «Джотто». Одна из принципиальных особенностей организации полёта к комете Галлея заключалась в том, что межпланетный аппарат должен пролететь на строго определённом минимальном расстоянии от головы кометы, чтобы обеспечить необходимые условия для работы бортовой аппаратуры. Это связано с огромной относительной скоростью пролёта аппарата мимо кометы – 80 километров в секунду.
Когда баллистикам ЦУПа стало известно, что аппаратура «Джотто» рассчитана на работу при пролёте кометы на расстоянии ~ 550 километров, они немедленно проинформировали своих европейских коллег о невозможности выполнения этого условия. Как показали исследования, на момент встречи положение кометы Галлея может быть известно с точностью только в несколько тысяч километров. Но переделать что-либо в европейском проекте было уже поздно. В этой критической ситуации специалисты ЦУПа предложили уникальный метод наведения европейского аппарата на комету с требуемой точностью. Суть его заключалась в том, что советские межпланетные станции «Вега-1» и «Вега-2», сближаясь с кометой Галлея на несколько дней раньше «Джотто», могли проводить некоторые специальные измерения, обработка которых совместно с траекторными измерениями с Земли станций «Вега» и оптическими наблюдениями кометы позволяли определить её положение с точностью в несколько десятков километров. Так родился международный проект «Лоцман», и головным в нём стал подмосковный ЦУП. Проекты «Вега» и «Лоцман» были успешно реализованы.
В июле 1988 года стартовали автоматические межпланетные станции «Фобос-1» и «Фобос-2». Они предназначались для комплексного исследования Марса и его спутника Фобоса. Но в сентябре не состоялся очередной запланированный сеанс радиосвязи с первой из этих станций, и все попытки восстановить связь окончились безрезультатно. Вторая станция продолжила путь и в январе 1989 года была переведена на околомарсианскую орбиту. С помощью ряда манёвров орбита неоднократно корректировалась, чтобы обеспечить постепенное сближение станции с Фобосом. Во время этого полёта проводилась телевизионная и тепловая съёмка Марса. На Землю передавалась информация об особенностях обтекания планеты солнечным ветром и характеристики её магнитосферы. Затем наступила очередь Фобоса. Для обеспечения сближения с ним требовалась высокая точность. И впервые в практике межпланетной экспедиции был успешно отработан способ навигации космического аппарата с использованием телевизионных изображений естественного небесного тела такой сложной формы, каким является этот спутник Марса. Телевизионные изображения Фобоса в различных ракурсах регулярно передавались на Землю. К сожалению, в конце марта радиосвязь со станцией прекратилась.
Ракетно-космическая система «Энергия–Буран»
Для обеспечения лётно-конструкторских испытаний универсальной ракетно-космической транспортной системы «Энергия–Буран» в составе ЦУПа был создан фактически ещё один центр управления. Когда принималось решение о его создании, справедливо считалось, что богатый опыт действующего подмосковного ЦУПа с большим математическим обеспечением, обновлённым парком вычислительной техники и квалифицированным персоналом позволит ввести новый центр в необходимые тогда короткие сроки. «Бурановский» центр сдали в эксплуатацию в начале 1987 года. При этом были разработаны уникальные методические, программные и технические средства приёма и обработки информации с ракеты-носителя «Энергия» в реальном масштабе времени. И уже в мае прошло их практическое апробирование при первом пуске «Энергии».

Орбитальный корабль «Буран» для своего первого полёта был подготовлен в беспилотном варианте. 15 ноября 1988 года он совершил запланированные два витка и приземлился на посадочную полосу космодрома Байконур. Программа лётных испытаний была выполнена полностью, хотя метеорологические условия в этот день не благоприятствовали полёту.
Накануне старта шёл дождь. В случае понижения температуры (что по прогнозу не исключалось) это грозило обледенением посадочной полосы. Однако температура сохранилась на уровне пяти градусов выше нуля. Дождь прекратился за несколько часов до старта, но резко усилился ветер, скорость которого в порывах достигала 17 метров в секунду. При дальнейшем усилении ветра свыше 20 метров в секунду старт был бы отменён. Сплошная облачность плотным слоем закрывала всё небо. Высота нижней кромки облаков составляла 500 метров.
Управление полётом орбитального корабля «Буран» осуществлялось автоматизированной системой, ключевым звеном которой был подмосковный ЦУП. В эту систему входили бортовой вычислительный комплекс корабля, наземные и плавучие командно-измерительный пункты, спутники-ретрансляторы и радиотехнические средства космодрома.
После отделения от ракеты-носителя корабль «Буран», используя собственную двигательную установку, перешёл на круговую орбиту высотой 250 километров. Как и было предусмотрено программой испытательного полёта, после двух оборотов вокруг Земли он, погасив орбитальную скорость, начал снижаться. На этом этапе для управления использовался объединённый командно-диспетчерский пункт, расположенный вблизи посадочной полосы.
При сильном боковом ветре корабль «Буран» зашёл на посадочную полосу с отклонением от осевой линии 3,5 метра. А когда он остановился, это отклонение составило всего 0,8 метра.
Впервые в авиационно-космической технике был осуществлён в автоматическом режиме весь полёт от старта до приземления, вплоть до остановки на посадочной полосе космодрома.
Но этот полёт так и остался единственным. В настоящее время бывший «бурановский» центр управления после переоборудования и модернизации работает по программе МКС.
Околоземные автоматические космические аппараты
В середине 90-х годов прошлого столетия на ЦУП были возложены задачи по управлению полётом космических аппаратов научного и социально-экономического назначения. Это стало принципиально новым направлением в его работе. С целью решения данной задачи был создан отдельный сектор управления. Основной идеей построения этого сектора являлось то, что на него наряду с традиционными задачами, такими как баллистико-навигационное, телеметрическое, командно-программное обеспечение управления полётом, отображение полётной информации, возлагались и качественно новые задачи – долгосрочное и оперативное планирование полёта, оперативное управление, в том числе непосредственно в ходе сеансов связи, оперативный и детальный анализ состояния обеспечивающей и научной аппаратуры, принятие мер по выходу из нештатных ситуаций. Кроме того, на этот сектор были возложены задачи организации всей работы по подготовке к управлению полётом космических аппаратов научного и социально-экономического назначения, включая взаимодействие с организациями, участвующими в управлении.

член-корреспондент Российской академии космонавтики имени К.Э.Циолковского, кандидат технических наук, доцент Московского государственного технического университета имени Н.Э.Баумана Н.Л. Соколов
Принципиально новым стало и то, что впервые основу Главной оперативной группы управления этими аппаратами составили штатные сотрудники ЦУПа, а не головных предприятий-разработчиков. Такой подход позволял управлять разными спутниками, изготовленными на разных предприятиях, сохраняя при этом прежний сработавшийся костяк группы управления. Руководителем полёта космических аппаратов научного и социально-экономического назначения в 1999 году был назначен тоже штатный сотрудник ЦУПа Николай Леонидович Соколов, член-корреспондент Российской академии космонавтики имени К.Э.Циолковского, кандидат технических наук, доцент Московского государственного технического университета имени Н.Э.Баумана.
С 17 июля 1999 года по 23 апреля 2002 года ЦУП управлял полётом российско-украинского космического аппарата «Океан-О» №1, предназначенного для оперативного получения информации дистанционного зондирования Земли и Мирового океана в оптическом, инфракрасном и микроволновом диапазоне спектра, сбора и передачи информации с морских, ледовых и наземных платформ с целью изучения фундаментальных проблем и эффективного решения прикладных задач, связанных с состоянием окружающей среды и влиянием на нее природных и техногенных процессов. В ходе управления был разработан оригинальный метод поддержания ориентации космического аппарата с помощью аэродинамических и гравитационных моментов, без расхода топлива. Новый метод показал свою эффективность в сложных условиях высокой солнечной активности, сопровождающейся мощными магнитными бурями.
С 10 декабря 2001 года по 8 марта 2006 года ЦУП управлял космическим аппаратом «Метеор-ЗМ» №1, имеющим на борту многофункциональную научную аппаратуру, в том числе американский прибор «Сейдж-3». Космический аппарат «Метеор-ЗМ» был многоцелевым искусственным спутником Земли, одновременно решающим задачи изучения природных ресурсов, контроля состояния окружающей среды, гидрометеорологического и гелиогеофизического обеспечения. В процессе управления полётом была разработана новая универсальная технология информационного взаимодействия подмосковного ЦУПа с Центром имени Лэнгли (США), с сектором главного конструктора (НИИ электромеханики, г.Истра Московской обл.), с главным оператором (Центром космических наблюдений, г.Москва).
В соответствии с программой сотрудничества между Федеральным космическим агентством России и Национальным космическим агентством Украины ЦУП управлял украинским спутником дистанционного зондирования Земли «Сич-1М» в начальный период его полёта. Этот спутник был выведен на орбиту 24 декабря 2004 года. После завершения начального этапа 11 января 2005 года управление было передано украинской стороне (ЦУП, г. Евпатория).
«Фотон-М»
№ 2 С 31 мая по 16 июня 2005 года ЦУП управлял космическим аппаратом «Фотон-М» № 2 научного назначения, обеспечив в расчётное время его сход с орбиты и приземление спускаемого аппарата в заданном районе. Также успешно было осуществлено управление и следующим аппаратом этого типа – «Фотом-М» № 3, полёт которого состоялся 14–26 сентября 2007 года
С 26 мая 2006 года по 2 июля 2007 года осуществлялось управление малогабаритным космическим аппаратом «Компас-2», выведенным на околоземную орбиту ракетой-носителем «Штиль» с борта атомной подводной лодки из акватории Баренцева моря. Основной задачей этого космического аппарата было обнаружение и регистрация аномальных физических явлений и характерных признаков в ионосфере, связанных с вулканической, сейсмической, циклонической или грозовой активностью.

«Ресурс-ДК1»
С 15 июня 2006 года по настоящее время ЦУП управляет космическим аппаратом оптико-электронного наблюдения «Ресурс-ДК1», предназначенного для многоспектрального дистанционного зондирования земной поверхности с высоким пространственным разрешением.
Продолжается подготовка к управлению и другими автоматическими космическими аппаратами. При этом персонал управления и аппаратно-программные средства ЦУПа ориентируются с таким расчётом, чтобы в перспективе можно было обеспечить одновременную работу с 10-15 аппаратами (а в дальнейшем с 25-30), находящимися на околоземной орбите.
Программа «Морской старт»
С 1999 года подмосковный ЦУП постоянно участвует в обеспечении запусков космических аппаратов по международному проекту «Морской старт» с ракетно-космического комплекса морского базирования, в состав которого входят сборочно-командное судно и самоходная стартовая платформа. При пусках ракеты-носителя «Зенит-3SL» из ЦУПа управляют полётом разгонного блока ДМ-SL, который выводит космический аппарат на заданную орбиту.
Основной целью проекта «Морской старт» является оказание услуг на коммерческой основе по запуску космических аппаратов с мобильной стартовой платформы морского базирования.
Для реализации проекта в апреле 1995 года была образована компания «Морской старт» (Sea Launch Company).
Её учредителями являются: Компания «Боинг коммершел спейс» (Boeing Commercial Spaсe Company, США), Ракетно-космическая корпорация «Энергия» имени С.П.Королёва (Россия), компания «Кварнер мэритайм» (Kvaerner Maritime a.s, Норвегия), Государственное конструкторское бюро «Южное» и Производственное объединение «Южный машиностроительный завод» (Украина) В оснащении судов оборудованием для обеспечения пусков основное участие принимало Конструкторское бюро транспортного машиностроения (Россия).
Типовая схема выведения космического аппарата на целевую орбиту включает в себя несколько полётных операций. Первая из них заключается в выведении его ракетой-носителем «Зенит-2S» (первыми двумя ступенями ракеты «Зенит-3SL») на промежуточную орбиту с отрицательной высотой в перигее. После чего с помощью двух включений маршевого двигателя разгонного блока ДМ-SL космический аппарат переводится сначала на опорную орбиту, а затем – на целевую переходную к геостационарной. Дальнейший переход на геостационарную орбиту космический аппарат может осуществлять либо с использованием своей двигательной установки, либо с помощью третьего включения маршевого двигателя разгонного блока ДМ-SL.
После отделения космического аппарата от разгонного блока последний переводится на так называемую орбиту хранения, на которой из него стравливаются остатки топлива и газов.
На участке работы ступеней ракеты-носителя «Зенит-2S» управление её полётом ведётся из центра управления пусками, который находится на сборочно-командном судне, на участке работы разгонного блока – из подмосковного ЦУПа. После отделения космического аппарата от разгонного блока управление аппаратом передаётся заказчику, а разгонным блоком продолжает управлять подмосковный ЦУП.
За десять лет эксплуатации плавучего космодрома со стартовой платформы «Одиссей» осуществлено 27 успешных запуска. Частично успешным был запуск 29 июня 2004 года. Тогда из-за преждевременного выключения маршевого двигателя разгонного блока максимальная высота целевой орбиты спутника Telstar-18 оказалась значительно ниже расчётной. Неудачным оказался запуск 12 марта 2000 года, когда полёт ракеты-носителя пришлось прекратить на 467-й секунде после старта. А 31 января 2007 года ракета-носитель взорвалась при запуске, повредив стартовую платформу. После проведения ремонтно-восстановительных был назначен следующий запуск на ноябрь текущего года. Однако этот запуск в намеченные сроки осуществить не удалось из-за сильных течений и ветров в экваториальной зоне Тихого океана, которые не позволяли стартовой платформе удерживать стабильное положение.
Вернуться к ЧАСТИ 1
(c) www.mcc.rsa.ru







 Конкурсы
Конкурсы Карта
Карта




